说到高精度执行器,步进电机可能并非你首先想到的设备。然而,正如[Diffraction Limited]的亚微米级微操作器所展示的那样,它们在与外部反馈配合使用时可以达到极高的精度。
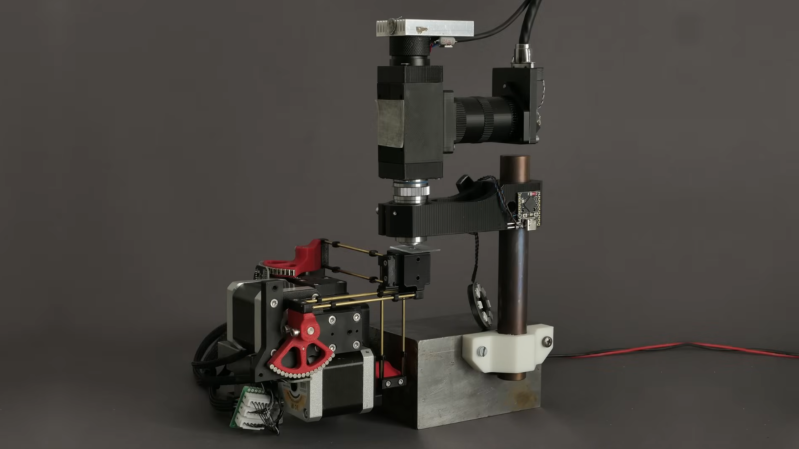
该微操作器由一个移动平台构成,该平台由三对平行连杆支撑,每个连杆由安装在步进电机上的曲柄驱动。这些连杆并非通过常见的柔性连接结构,而是通过球窝接头旋转。为了最大限度地减少摩擦的影响,连杆杆比球头更长,并且允许的角度范围较大,使操作器的平台可以向每个方向移动 23 毫米。
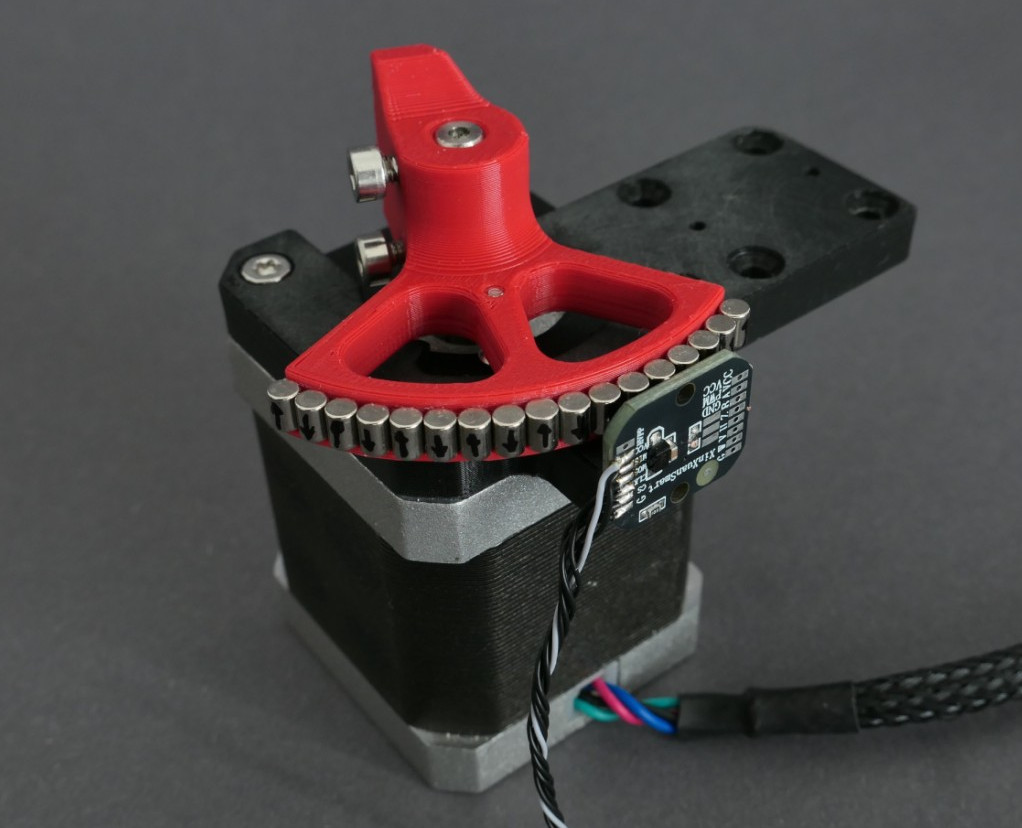 为了兼顾精度和范围,步进电机需要闭环控制,而磁性旋转编码器正是提供这种控制的。该编码器可以将磁体的单次旋转分成10万步,但这对[Diffraction Limited]来说还不够;为了提高分辨率,他在转子上安装了一组极性交替的磁体,并将磁性编码器放置在这些磁体附近。当转子转动时,编码器的局部磁场快速旋转,形成一种磁力齿轮。
为了兼顾精度和范围,步进电机需要闭环控制,而磁性旋转编码器正是提供这种控制的。该编码器可以将磁体的单次旋转分成10万步,但这对[Diffraction Limited]来说还不够;为了提高分辨率,他在转子上安装了一组极性交替的磁体,并将磁性编码器放置在这些磁体附近。当转子转动时,编码器的局部磁场快速旋转,形成一种磁力齿轮。
这款作品由一台 Raspberry Pi Pico 2 和三个电机驱动器控制;即便如此,其对细节的关注也令人印象深刻。电机驱动器不能使用内部电荷泵或时钟逻辑单元,因为它们会引入微小的时序误差和运动抖动。载体电路板为双面,并使用通孔元件,方便复制;底部丝网印刷显示引脚编号,非常贴心。
为了测试该机械手的性能,[Diffraction Limited] 用它在显微镜下定位芯片。为了测试其准确性和可重复性,他用该机械手追踪了切片机为 Benchy 第一层生成的路径,该路径被大幅缩小。为了减少热漂移,机械手以低速运行,可以在 20 微米的范围内追踪 Benchy,分辨率约为 50 纳米。
他已经使用微操作器将光纤与激光耦合,但[Diffraction Limited] 还考虑了其他一些用途,包括无掩模光刻(或许会将步进式光刻机引入“晶圆步进式光刻机”)、电化学 3D 打印、焦点堆叠和微加工。想了解小规模制造的另一个有前景的方案,请查看RepRapMicron 。
感谢[Nik282000]提供的提示!
原文: https://hackaday.com/2025/09/04/designing-an-open-source-micro-manipulator/