机械臂与数控机床有很多共同之处,因为它们通常由固定的脚本驱动,脚本规定了移动到特定位置并执行特定动作。自主行为并非常态,尤其对于业余爱好级别的机器人而言。随着 Hugging Face 社区推出的开源机器学习框架LeRobot的出现,这种情况正在迅速改变。
 SO-101 臂是一种经济的入门方式。
SO-101 臂是一种经济的入门方式。
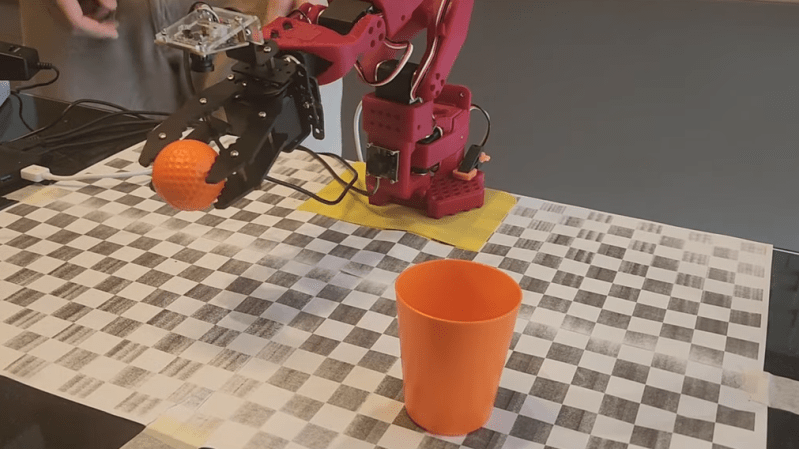
如果您快速浏览项目页面后仍有疑问,那您并不孤单。值得庆幸的是,[Ilia] 制作了一个精彩的视频,完美地解释并演示了相关基础知识。视频中,他通过示例演示了 LeRobot 如何训练经济实惠的 3D 打印机械臂,教它自主执行一项任务。在这个例子中,任务是捡起一个球并将其放入杯中。
[Ilia] 首先通过手动操作机械臂拾起一个球并将其放入杯子来构建一个数据集。然后,他利用这个仅包含约 50 个此类示例的数据集,创建了一个机器学习模型,该模型能够驱动机械臂自主拾起一个球并将其放入杯子中,无论球和杯子的实际位置如何。它甚至可以优雅地处理诸如颜色变化以及 [Ilia] 在任务中移动杯子和球等情况。您可以直接跳到 34:16观看这种自主行为的实际操作,但我们建议您观看完整视频,以获得易于理解且技术性很强的概述。
LeRobot 是一个非常灵活的框架,其功能远不止在 3D 打印的低成本机械臂上进行模仿学习。但正如 [Ilia] 所展示的那样,其主要目标是让几乎任何人都能轻松上手。我们已经见过无数高质量的 DIY 机械臂,由于 LeRobot 框架发展迅速,且不依赖于任何特定硬件,它或许很快就会为下一个机器人项目赋能。
原文: https://hackaday.com/2025/08/23/lerobot-brings-autonomy-to-hobby-robots/