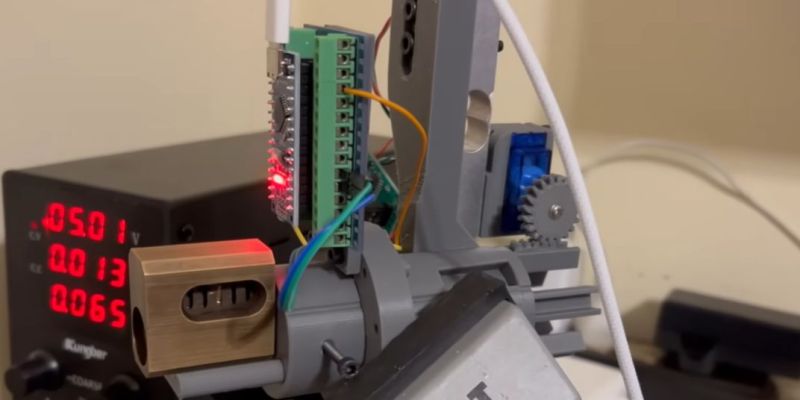
多年来,拥有一个能够快速、无人监管地撬开任何锁具,并拥有堪比专业人类开锁匠的技能的机器人一直是人们的梦想。然而,开锁机器人的一个主要问题是,当撬锁工具在锁芯内部施展魔法时,它们对锁芯(或类似物)没有任何感知能力。YouTube 上的 [Sparks and Code] 频道尝试了一种解决这个问题的方法,他们制造了一个机器人,利用空心钥匙中的细线、测力传感器和伺服器来模拟人类开锁匠撬动弹子锁的体验。
虽然这段经历大多是令人沮丧的挫折和失败,但它确实展现了一种有趣的方法来感知每个通道中弹子锁的阻力。撬动弹子锁的目标是确定弹子锁何时被锁定在可以旋转的位置,并感知可能也位于弹子锁中的安全弹子是否构成了假锁。这并非易事,或许也是大多数撬锁机器人最终只能暴力破解所有可能组合的原因。
也许,采用更传统的“旋转和撬动”式方法——在撬动和旋转工具上安装一个或多个称重传感器——或者借鉴Lishi高效解码工具的设计,会更有效。无论如何,提高开锁机器人的灵敏度是一个好主意,尽管这很难实现。目前,YouTube上的开锁爱好者的工作仍然不会被机器人抢走。
感谢[Numbnuts]提供的提示。
原文: https://hackaday.com/2025/07/21/a-lockpicking-robot-that-can-sense-the-pins/