随着人类准备重返月球(“留下来”,正如他们不断提醒我们的那样),需要建造大量基础设施以确保宇航员在月球表面的安全和生产力。如果没有 GPS,导航和测绘会困难得多——NASA 正在与激光雷达公司Aeva合作,开发一种工具,可以在普通相机和卫星仪器无法扫描地形的情况下扫描地形。
该项目称为 KNaCK,或运动学导航和制图背包,旨在充当一种基于同时定位和映射 (SLAM) 概念的超精确航位推算系统。
这是必要的,因为目前,我们在月球、火星或任何其他行星上都没有 GPS 类型的技术,虽然我们有来自轨道的高分辨率表面图像,但这并不总是足以导航。例如,在月球的南极,太阳的固定角度会导致永远不会被照亮的深阴影,以及需要小心观察的明亮的高光。由于地表以下有大量水,该区域是月球作业的目标,但我们只是不知道地表的详细情况。
即使在黑暗或明亮的阳光下,激光雷达也提供了一种绘图选项,并且它已经用于着陆器和其他仪器用于此目的。然而,美国宇航局正在寻找的是一个小到可以安装在宇航员背包或漫游车上的装置,同时能够扫描地形并实时生成详细的地图——并准确确定它在其中的位置。
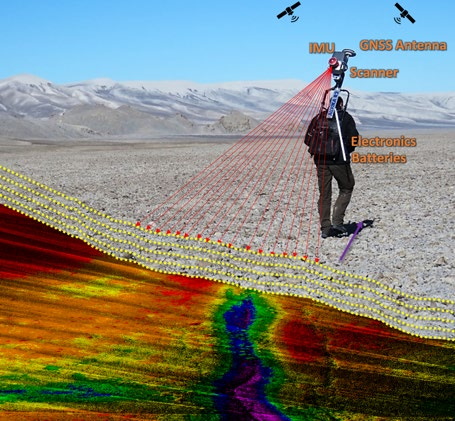
背包式激光雷达的概念图。
这就是 NASA 在过去几年中所做的,由太空技术任务理事会的“早期职业计划”资助,该计划自 2019 年启动以来旨在“通过与世界级的外部创新者合作,振兴 NASA 的技术基础和最佳实践。”在这种情况下,创新者是 Aeva,它以汽车激光雷达和感知系统而闻名。
与许多此类系统相比,Aeva 的优势在于其激光雷达除了捕获给定点的范围外,还将捕获其速度矢量。因此,当它扫描街道时,它知道一个形状以 30 MPH 的速度向它移动,而另一个形状以 5 MPH 的速度离开,而其他形状相对于传感器自身的运动静止不动。这一点,以及它使用调频连续波技术而不是闪光或其他激光雷达方法,意味着它可以抵抗明亮阳光的干扰。
幸运的是,无论如何,光在月球上的工作原理与在地球上的工作原理相同。缺乏气氛确实会改变一些事情,但在大多数情况下,它更多的是确保技术可以安全地做它的事情。
“没有必要改变波长或光谱或类似的东西。 FMCW 使我们能够在这里或其他任何地方获得所需的性能,”Aeva 首席执行官 Soroush Salehian 说。 “关键是加强它,这是我们正在与 NASA 及其合作伙伴合作的事情。”
“因为我们已经将所有元素打包到这个小金盒中,这意味着系统的一部分不会因为大气条件(如真空条件)的变化而受到影响;该盒子是永久密封的,这使得该硬件既适用于太空应用,也适用于陆地应用,”Aeva 技术副总裁 James Reuther 解释道。
它仍然需要一些改变,他指出:“确保我们在真空中表现良好,确保我们有办法对系统产生的热量进行散热,并在发射过程中承受冲击和振动,并证明辐射环境。”
结果非常令人印象深刻——顶部图像中登月展览的 3D 重建是在收集的 23 秒内通过一个原型单元四处走动而捕获的。 (更大的景观更像是一次跋涉。)
美国宇航局的科学家们现在正在测试这项技术。项目负责人迈克尔·萨内蒂(Michael Zanetti)在沙漠中给我发了一封电子邮件:
该项目进展顺利。 KNaCK 项目目前(即现在、今天和本周)在新墨西哥州的沙漠现场测试用于科学数据收集和模拟月球和行星表面探测任务操作的硬件和软件。这是由来自 NASA 太阳系探索研究虚拟研究所 (SSERVI) RISE2 和 GEODES 团队的科学家和工程师组成的团队。我们正在使用 Aeva 的 FMCW-LiDAR 收集数据,以制作这里的地质露头的 3D 地图(以测量坡度、通行性、一般形态),并评估任务操作如何利用人员安装的 LiDAR 系统进行态势感知.
他们在这里:

图片来源:美国国家航空航天局
Zanetti 表示,他们还将很快在火星车原型机和马歇尔太空飞行中心的大型模拟风化层沙箱中测试 Aeva 激光雷达装置。毕竟,适合地球上自动驾驶的技术很可能也适用于月球。
这种类型的激光雷达在着陆器和漫游车情况下的一个有趣的相关应用是检测和表征尘埃云。这可以用于评估环境条件,或估计着陆的速度和湍流,以及其他事情——我们肯定知道的一件事是它可以形成一个看起来很酷的点云:
图片来源:美国国家航空航天局
一旦完成,KNaCK 应该能够同时实时绘制宇航员的周围环境,并告诉他们他们在哪里以及他们的行进速度。这将全部输入一个更大的系统,当然,被传送回一个着陆器,一个轨道器,等等。
当然,所有这些都是待定的,虽然他们敲定了这个有前途但仍处于早期阶段的系统的基础。随着我们越来越接近实际的月球操作,期待听到更多消息——还有几年的时间。
原文: https://techcrunch.com/2022/04/21/aeva-and-nasa-want-to-map-the-moon-with-lidar-powered-knack-pack/