机械臂和类似系统最基本的问题之一是减轻重量,因为更大的重量需要更坚固的框架和更强的执行器。电缆驱动系统是一种经典的解决方案,来自麻省理工学院和浙江大学的研究团队最近分享了一些设计全3D打印电缆驱动机构的技术。
研究人员开发了一组四个原始运动组件:弯曲组件、线圈、螺旋组件和压缩组件。这些组件可以串联或并联一起工作,以形成更复杂的结构。为了进行演示,研究人员设计了一个抓握的触手、一个鸟爪和一个类似蜥蜴的行走机器人,但更复杂的结构当然是可能的。此外,由于电缆本身是印刷的,因此它可以具有额外的功能,例如单向棘轮机构或用于触觉反馈的凸块。
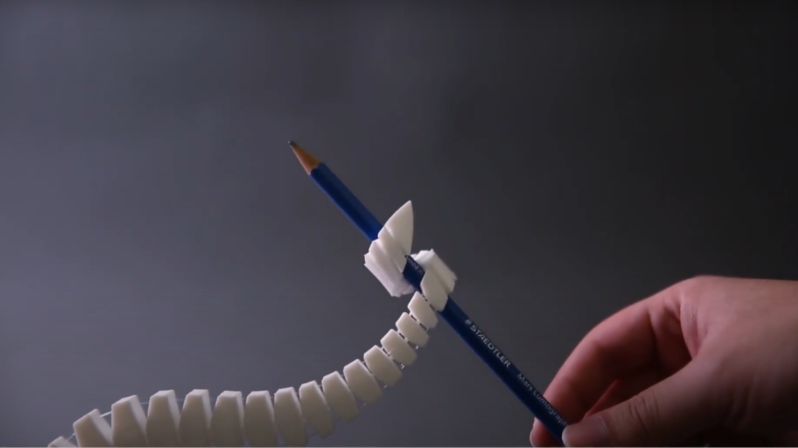
这些印刷电缆是该项目中最新颖的方面,需要进行大量微调才能正常工作。为了比手动组装的电缆驱动系统更具优势,它们需要就地打印。这需要特殊的打印机设置,以避免电缆层之间分层、电缆粘在其他组件上或电缆卡在机构的接头中。经过一些实验,研究人员发现尼龙丝在电缆强度和柔韧性之间提供了最佳平衡,同时又不会紧紧粘附在 PLA 结构上。
我们之前已经在这里见过几次电缆驱动系统。如果您有兴趣更深入地了解,我们也对此进行了介绍。
感谢 [Madeinoz67] 的提示!
原文: https://hackaday.com/2025/05/03/3d-printed-cable-driven-mechanisms-some-strings-attached/