西北大学的机器蟹到底有多小?它很小。它有半毫米宽——比普通跳蚤还要小。
它背后的研究人员已经确定了一种相当简单的远程控制方法——当对系统施加热量时,其薄薄的玻璃涂层会使系统的形状变形,从而在此过程中产生运动。
使用激光,机器人可以快速加热,因为它的表面积很小。当激光关闭时,它会迅速冷却。快速连续这样做会导致机器人行走。为了让它向左移动,激光从右到左扫描。向右走,激光则相反。

一只小机器蟹从画面中掠过。图片来源:西北大学
“我们的技术可以实现多种受控运动方式,并且可以以每秒一半身体长度的平均速度行走,”首席研究员黄永刚说。 “对于陆地机器人来说,要在如此小的规模上实现这一点非常具有挑战性。”
该团队表示,他们构建机器人的方式类似于制作弹出式书籍。根据西北大学的说法,首先,该团队以平坦的平面几何形状制造了步行蟹结构的前身。然后他们将这些前体粘合到略微拉伸的橡胶基材上。当拉伸的基材松弛时,会发生受控的屈曲过程,导致螃蟹“弹出”成精确定义的三维形状。
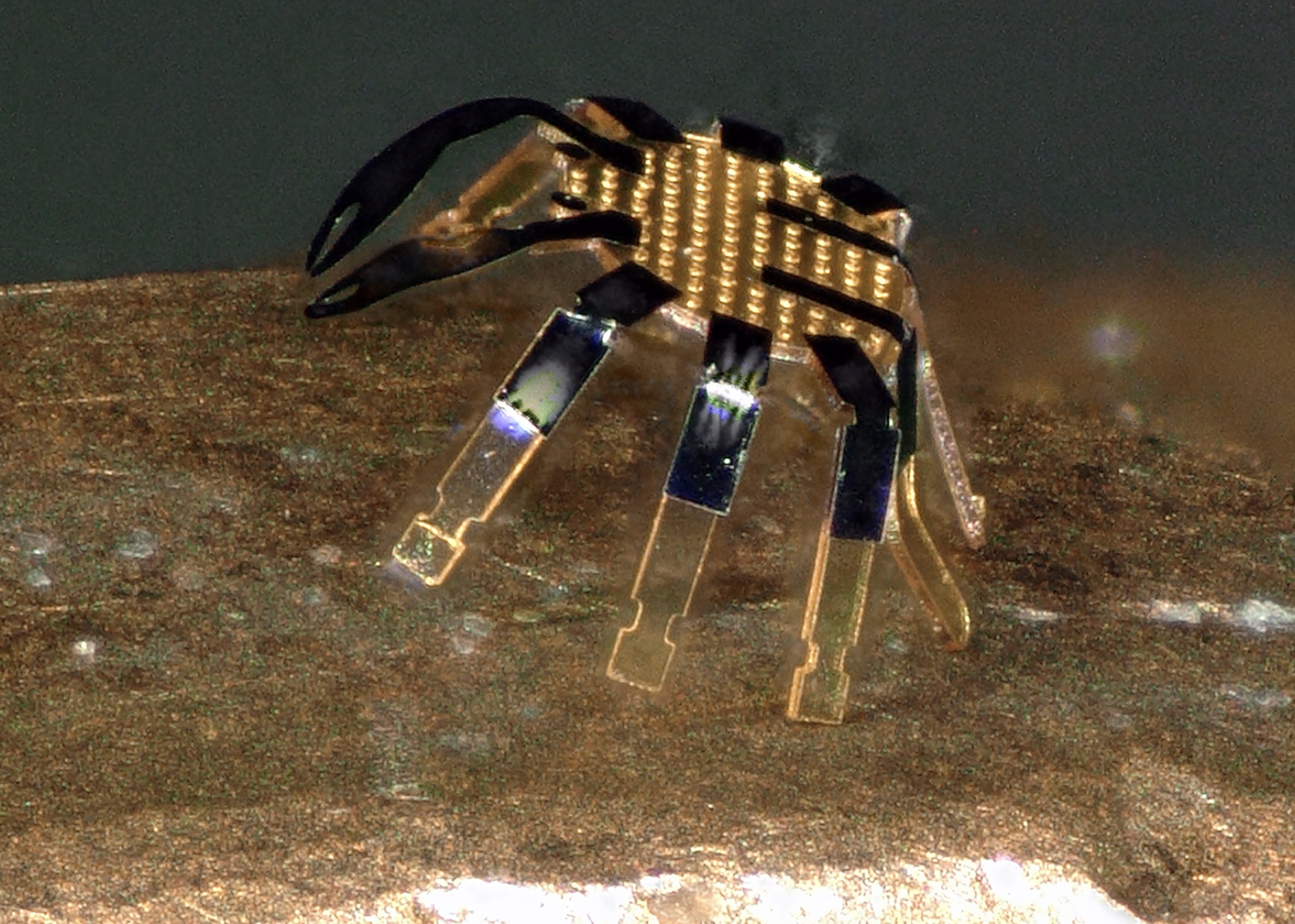
小机器蟹。图片来源:西北大学
该方法允许创建各种形状。除了螃蟹,该团队还能够设计出大约一毫米大小的微小尺蠖,以及甲虫和蟋蟀。将这个微型系统称为一个合适的机器人可能有点牵强,但这种小型远程控制系统的创建仍然令人兴奋。将来,它们可以用来挤进狭小的空间来执行简单的任务。
原文: https://techcrunch.com/2022/05/25/this-remote-controlled-robot-crab-can-sit-on-the-side-of-a-penny/