机器学习和人工智能领域的研究现在几乎是每个行业和公司的一项关键技术,但内容太多,任何人都无法阅读。本专栏 Perceptron(前身为Deep Science )旨在收集一些最相关的最新发现和论文——尤其是在但不限于人工智能方面——并解释它们为何重要。
本周在人工智能中,研究人员发现了一种方法,即使机器人的通信被端到端加密,也可以让对手跟踪远程控制机器人的运动。来自格拉斯哥斯特拉斯克莱德大学的合著者表示,他们的研究表明,采用最佳网络安全实践不足以阻止对自治系统的攻击。
远程控制或远程操作有望使操作员能够在一系列环境中从远处引导一个或多个机器人。 Pollen Robotics 、 Beam和Tortoise等初创公司已经展示了遥控机器人在杂货店、医院和办公室中的实用性。其他公司开发远程控制机器人,用于处理炸弹或勘测高辐射地点等任务。
但新的研究表明,远程操作,即使被认为是“安全的”,在其易受监视的情况下也存在风险。 Strathclyde 的合著者在一篇论文中描述了使用神经网络来推断远程控制机器人正在执行什么操作的信息。在收集机器人和控制器之间受TLS保护的流量样本并进行分析后,他们发现神经网络可以在大约 60% 的时间内识别运动,并以“高准确性。”
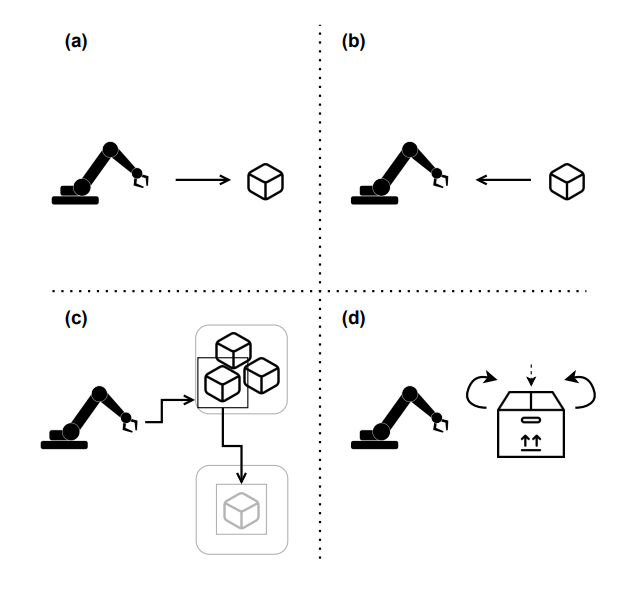
图片来源: Shah 等人。
谷歌和密歇根大学的研究人员进行的一项新研究以不那么直接的方式令人担忧,该研究探讨了在立法薄弱和对人工智能“全国乐观”的国家,人们与人工智能驱动系统的关系。这项工作调查了印度“财务压力大”的即时贷款平台用户,这些平台以风险建模人工智能确定的信贷为目标借款人。根据合著者的说法,用户对即时贷款的“恩惠”感到亏欠,并有义务接受苛刻的条款、过度分享敏感数据和支付高额费用。
研究人员认为,研究结果表明需要更大的“算法问责制”,特别是在涉及金融服务中的人工智能的情况下。他们写道:“我们认为问责制是由平台-用户权力关系塑造的,并敦促政策制定者谨慎采用纯技术方法来促进算法问责制。” “相反,我们呼吁采取适当的干预措施来增强用户的代理权,实现有意义的透明度,重新配置设计师与用户的关系,并促使从业者对更广泛的责任进行批判性反思。”
在不那么艰巨的研究中,多特蒙德大学、莱茵瓦尔大学和荷兰莱顿 LIACS 大学的一组科学家开发了一种算法,他们声称可以“解决”火箭联盟的游戏。为了找到一种计算强度较低的方法来创建游戏 AI,该团队利用了他们所谓的“sim-to-sim”传输技术,该技术训练 AI 系统执行游戏中的任务,如守门和在脱衣-down,火箭联盟的简化版。 (火箭联盟基本上类似于室内足球,除了在三人团队中使用汽车而不是人类球员。)
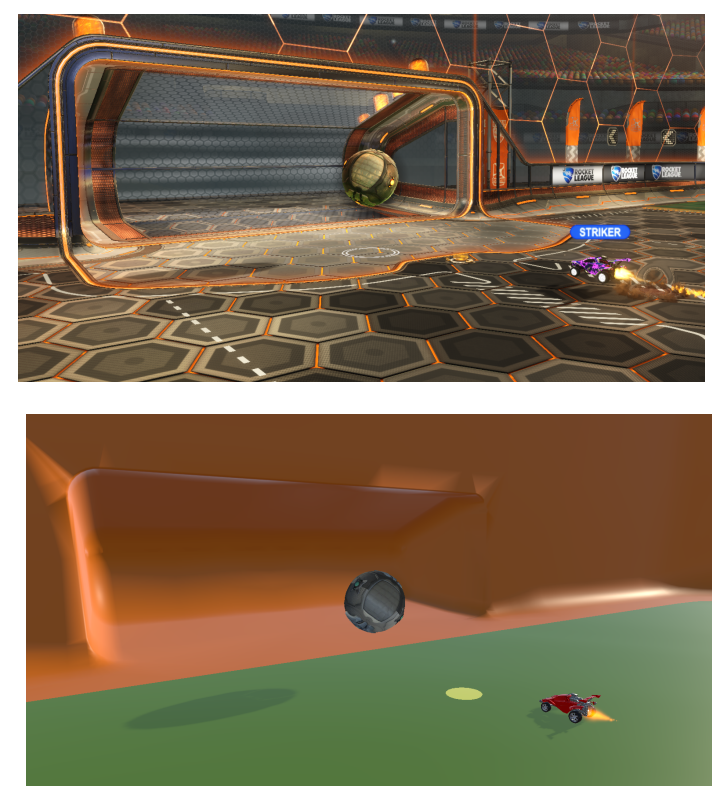
图片来源: Pleines 等人。
这并不完美,但研究人员的火箭联盟比赛系统在守门员时设法挽救了几乎所有的射门。在进攻端,该系统成功命中了 75% 的投篮——这是一个可观的记录。
人体运动模拟器也在快速发展。 Meta 在跟踪和模拟人体肢体方面的工作在其 AR 和 VR 产品中有着明显的应用,但它也可以更广泛地用于机器人技术和具身人工智能。本周发表的研究从马克·扎克伯格那里得到了一些启示。
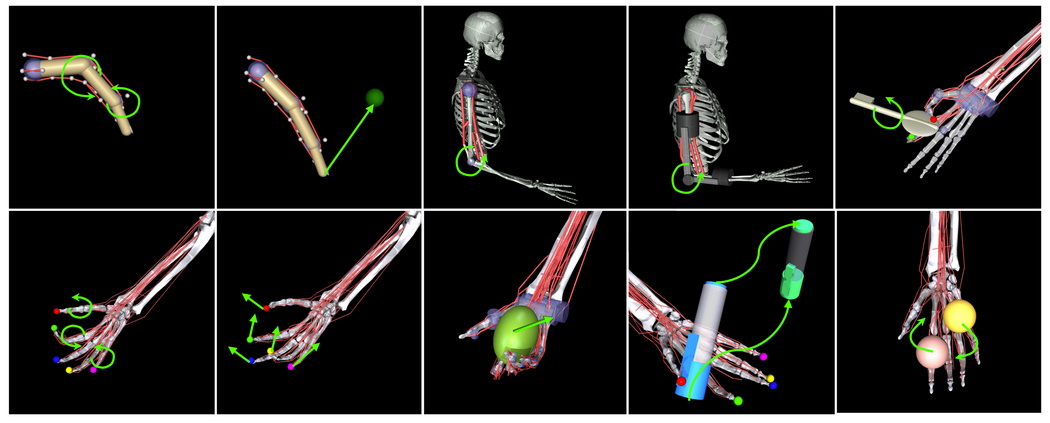
在 Myosuite 中模拟骨骼和肌肉群。图片来源:元
MyoSuite模拟 3D 中的肌肉和骨骼,因为它们与物体和自身交互——这对于代理学习如何正确握住和操纵物体而不压碎或掉落它们以及在虚拟世界中提供逼真的抓握和交互非常重要。据推测,它在某些任务上的运行速度要快数千倍,这让模拟学习过程发生得更快。 “我们将开源这些模型,以便研究人员可以使用它们进一步推进该领域,”扎克说。他们做到了!
许多这些模拟都是基于代理或对象的,但麻省理工学院的这个项目着眼于模拟独立代理的整体系统:自动驾驶汽车。这个想法是,如果你在路上有很多汽车,你可以让它们一起工作,不仅可以避免碰撞,还可以防止空转和不必要的停车。
如果你仔细观察,只有前面的车才会真正停下来。图片来源:麻省理工学院
正如您在上面的动画中看到的那样,一组使用 V2V 协议进行通信的自动驾驶汽车基本上可以通过逐渐减速来阻止除最前面的汽车以外的所有汽车,但不会太多以至于它们实际上会停下来。这种超速行驶行为可能看起来并没有节省多少汽油或电池,但当你将其扩展到数千或数百万辆汽车时,它确实会产生影响——而且它也可能是一种更舒适的乘坐体验。不过,祝大家好运,让每个人都像这样完美地接近十字路口。
瑞士正在用 3D 扫描技术好好审视自己。该国正在使用配备激光雷达和其他工具的无人机制作一张巨大的地图,但有一个问题:无人机的移动(故意和意外)将错误引入需要手动纠正的点地图。如果您只是扫描一栋建筑物而不是整个国家,这不是问题吗?
幸运的是,EPFL 的一个团队正在将 ML 模型直接集成到激光雷达捕获堆栈中,该堆栈可以确定何时从不同角度多次扫描对象,并使用该信息将点图排列成单个粘性网格。这篇新闻文章不是特别有启发性,但它附带的论文更详细。在上面的视频中可以看到生成的地图示例。
最后,在意想不到但非常令人愉快的人工智能新闻中,苏黎世大学的一个团队设计了一种用于跟踪动物行为的算法,这样动物学家就不必通过数周的镜头来寻找求爱舞蹈的两个例子。这是与苏黎世动物园的合作,当您考虑以下因素时,这是有道理的:“我们的方法可以识别研究动物的细微或罕见的行为变化,例如压力、焦虑或不适的迹象,”实验室负责人 Mehmet Fatih Yanik 说。
因此,该工具可用于学习和跟踪圈养行为、动物园圈养动物的福祉以及其他形式的动物研究。他们可以使用更少的主题动物并在更短的时间内获得更多的信息,而研究生们在深夜仔细研究视频文件的工作也更少。对我来说,这听起来像是一个双赢的局面。
图片来源: Ella Marushenko / 苏黎世联邦理工学院
另外,喜欢插图。