通常,当你在同一句话中听到“绳子”和“狗”这两个词时,你会想到一条被拴着的狗,但对于这只机器狗来说,绳子是让它移动的动力,而不是阻止它走得太远的动力。[Aaed Musa] 的最新项目是CARA,这只机器狗主要由 3D 打印部件制成,配备了无刷电机,并用绳子将电机和腿绑在一起。
在之前的一篇文章中,我们介绍了[Aaed Musa]利用绳索作为绞盘驱动器的机制,实现了高扭矩和极小甚至无间隙。他采用了该变速箱设计,稍加调整,并使用三个电机,最终制作出一条能够在三个轴上移动的腿。为了使腿部能够按预期移动,他进行了大量逆运动学计算;一旦确定了每一步的运动,就该开始构建狗的其他部分了。
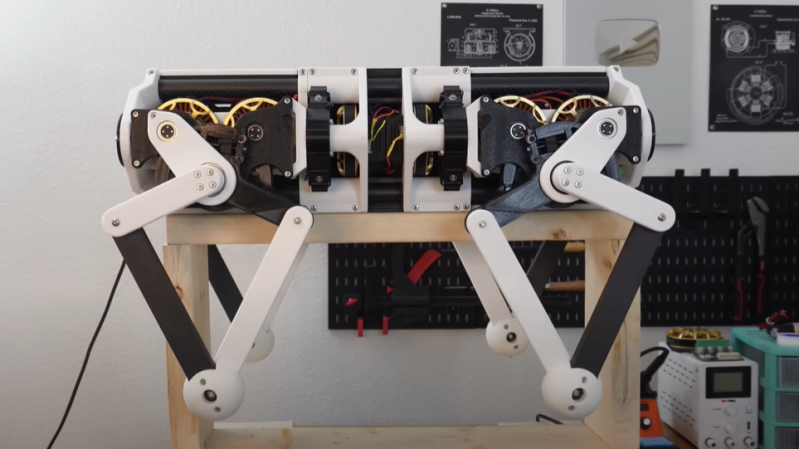
CARA 主要由 3D 打印部件构成,并由多根碳纤维管贯穿其整个长度以增强其刚性。所有腿部均可自由移动,不仅可以前后移动,还可以像真狗一样左右移动。它使用了 12 个大型无刷电机来提供所需的扭矩,并使用 ODrive S1 电机控制器来控制每个电机,这些控制器由 Teensy 4.1 微控制器通过 CAN 总线控制。此外,它还配备了一个小型 BNO086 IMU 惯性测量单元,用于感测 CARA 相对于重力的位置,并由一个 24V 无绳工具电池为所有部件供电。
组装完成后,CARA 的腿部在行走时需要进行一些运动类型的调整。他们对打印部件进行了一些调整,以解决一些结构问题,然后进行了大量逆运动学计算,以充分利用惯性测量单元 (IMU),使 CARA 能够应对倾斜,并实现更自然的运动方式。[Aaed Musa] 在他的网站以及下方视频中详细解释了他的方法;我们期待看到他未来的作品!
CARA 并不是本网站上唯一的机器狗——请务必查看我们在此介绍的其他机器狗。
原文: https://hackaday.com/2025/07/13/from-leash-to-locomotion-cara-the-robotic-dog/